2212 Brushless Motor
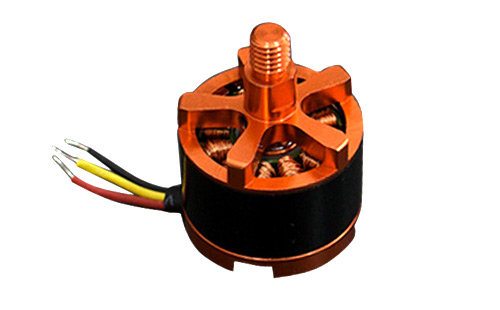

2212 (BLDC) BRUSHLESS DC MOTOR is a high speed brushless motor designed specifically for Quadcopters, Drones or toy planes. The motor is OUTRUNNER type where outside case rotates while inside stays fixed. It is one of popular model in the market because it’s low cost. It is preferred for small drones and planes. The model is available in different speeds and should be chosen appropriately.
The naming for the brushless motor goes like this 2212/13T 1000KV.
|
Info |
Represents |
Additional Info |
|
22 |
Diameter of Motor (22mm in this case) |
With greater diameter we will have more Torque. *Choose bigger one |
|
12 |
Height of Motor(12mm in this case) |
*Choose bigger one |
|
13T |
Number of turns per pole(13 turns per pole here) |
Lesser number of turns means high speed but less torque. Similarly higher number of turn’s means less speed but more torque. *Choose the higher turn one for lifting more weight |
|
1000KV |
Number of revolutions done by motor per volt of supply (1000 revolutions per volt here. If supply voltage is 10 volts then motor will rotate at 10000RPM) |
*Choose motor with higher KV for better thrust. |
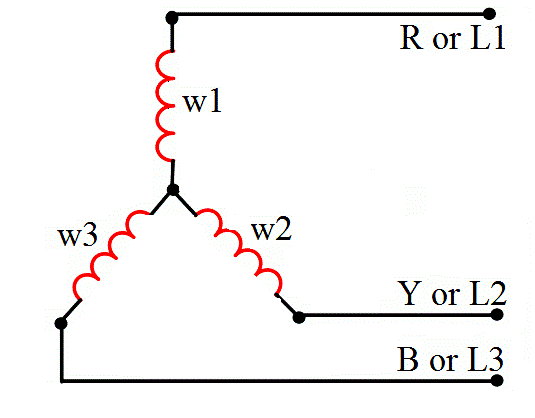
Brushless Motor Pin Configuration
The motor has three pins as shown in figure. The internal connection between three of them is shown below.
|
Pin Name |
Description |
|
R or L1 |
Connected to winding1 or phase1 |
|
Y or L2 |
Connected to winding2 or phase2 |
|
B or L3 |
Connected to winding3 or phase3 |
*Remember there is no neural terminal driven out from the winding connections.
Features and Specifications
- Operating voltage: 7.2V to 12V (2 to 3Li-poly or 6to10 NiCad)
- No load current:0.5Amp
- Maximum current:13Amp for 60Sec
- Maximum Watts:150 Watt
- Weight of motor:50-60 grams
- Maximum operating temperature: + 80°C
- Complete speed control because of three phase connection.
- Long life as there are no moving contacts.
*There are no industrial standard for these brushless motors. Different company devices have slightly different ratings. One should check BLDC motor datasheet for more info on particular model.
Where to Use 2212 BRUSHLESS MOTOR
Here are few reasons why 2212 BLDC Motor is chosen over other motors:
- 2212 is used when the project cost is low. 2212 is one of cheapest and robust motor on the market. It is available in any electronic market.
- 2212 is easy to work with considering many driver modules out there for the motor. With these modules we can easily control the speed of the brushless motor.
- Because of three phase connections we can control the speed of motor more accurately and also more smoothly.
- Efficiency is also one of reasons for choosing this motor. This motor efficiency is good considering its purchase cost.
How to Use 2212 BRUSHLESS MOTOR
As mentioned earlier, the motor is three phase driven and controlling it not easy. It is not like normal DC motor where you can plug the motor directly to power to make it rotate. We need to follow a certain pattern of powering the three phases of the motor to make it running.
For forward direction we need to follow the below table: (R, Y, B) OR (A, B, C)
|
STEP |
1 |
2 |
3 |
4 |
5 |
6 |
7 or 1 |
|
POSITIVE |
A |
A |
B |
B |
C |
C |
A |
|
GROUND |
B |
C |
C |
A |
A |
B |
B |
|
OPEN |
C |
B |
A |
C |
B |
A |
C |
For reverse direction we need to go as STEP6, STEP5…STEP1 in the above table.
For realizing the above tables consider the simple circuit shown below.
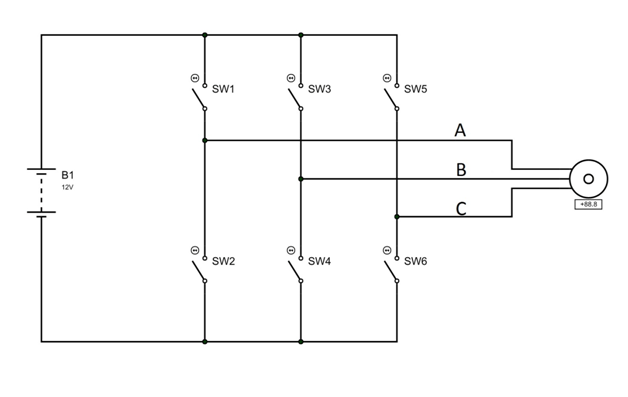
In the circuit we have six switches forming H-BRIDGE. The circuit connected to three phases of MOTOR as shown in above circuit. The step by step driving of switches goes as below-
Step1: SW1 and SW4 are closed(SW1—POSITIVE and SW4—GROUND).This makes the winding w1 and w2 inside the motor energized and making the motor complete step.
Step2: SW1 and SW6 are closed(SW1—POSITIVE and SW6—GROUND).This makes the winding w1 and w3 inside the motor energized and making the motor complete step.
Step3: SW3 and SW6are closed(SW3—POSITIVE and SW6—GROUND).This makes the winding w2 and w3 inside the motor energized and making the motor complete step.
Step4: SW3 and SW2 are closed(SW3—POSITIVE and SW2—GROUND).This makes the winding w2 and w1 inside the motor energized and making the motor complete step.
Step5: SW5 and SW2 are closed(SW5—POSITIVE and SW2—GROUND).This makes the winding w3 and w1 inside the motor energized and making the motor complete step.
Step6: SW5 and SW4 are closed(SW5—POSITIVE and SW4—GROUND).This makes the winding w2 and w3 inside the motor energized and making the motor complete step.
So on.
For reverse direction we will go from bottom to top.
As given in table controlling the brushless motor is complex and the order of trigger cannot be wrong. This will be problematic for beginners so it is best to use driver modules. With driver modules we can easily control the motor without any hassle.
Applications
- Drones
- QUADCOPTERS
- Robotics
- Toy planes
- Hobby projects
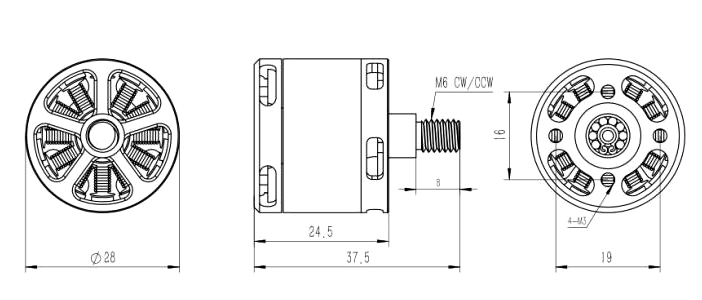
2D Model
All measurements are given in millimeters.